课程简介
(一)开发背景:在发生煤矿坍塌或者地震等地质灾害时,救助被困人员是首要任务,但事故发生后,里面坍塌程度以及被困人员的食物供给是救援首要考虑的任务,复杂险恶的地形人们不能贸然进入进行救援,这时我们的智能搬运小车就可以凭借其小巧灵活智能的特点进入到我们进不去的地方进行自动避障,将食物送入被困人员的地方,就算是遇到比较复杂险恶的环境,我们的智能搬运小车也可以凭借前方和右方的超声波安全的进行自救,同时也可以将事故现场的一些及时信息(比如矿井的温度、湿度,地形的复杂程度)和自身的信息(小车行驶的速度)通过我们的NRF24L01无线通信模块反馈给我们的上位机界面进行实时监测,确保它在我们的检测下圆满的完成任务,通过小车反馈给我们的信息不仅缓解了被困人员的食物供给不足的问题,而且我们根据这些数据可以制定更加科学的计划进行救援,保证救援率达到最大!
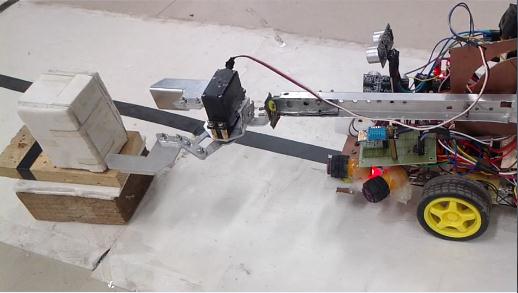
(二)结构说明:智能搬运小车整体完整的就够包括:单片机开发板(STC15F2K60S2为核心)、NRF24L01无线通信模块、机器臂、机器爪、Fubuta S3010舵机、MG995大功率舵机、DHT11温湿度传感器,HC-SR04超声波测距模块、L298N直流电机驱动模块、E18-D80NK漫发射式光电开关、TCRT5000四路循迹模块、可充电Ni-Cd电池(7.2V)。
(三)功能与使用说明:智能搬运小车会在我们划定的寻物区找到要搬运物体的载体,然后自动夹取要搬运的物体,然后通过寻物区进入我们的黑线循迹区,开始第一次发送它反馈回来的信息,行过循迹区后自动进入迷宫区域内进行自动壁障,这时迷宫区域内的所有信息都会发送过来,即使在地形很复杂的区域内,它也能够行驶过去进行自救,进入迷宫后将要搬运的物体放入盒子中然后出迷宫,进循迹区,最后停在我们的停车区;小车行驶的过程是全自动的,我们只要一开开关,它就会完整这系列的功能并最终回到停车区,我们只需在电脑前监控小车反馈给我们的信息,根据这些数据的变化我们大致可以了解到小车所处环境的地形复杂程度以及所处环境的温度、湿度,根据这些信息我们可以对小车所处的环境有一个全面的了解。
该系统相关内容介绍:http://forum.eepw.com.cn/thread/224455/1